Search and Rescue Rover
CC++Python
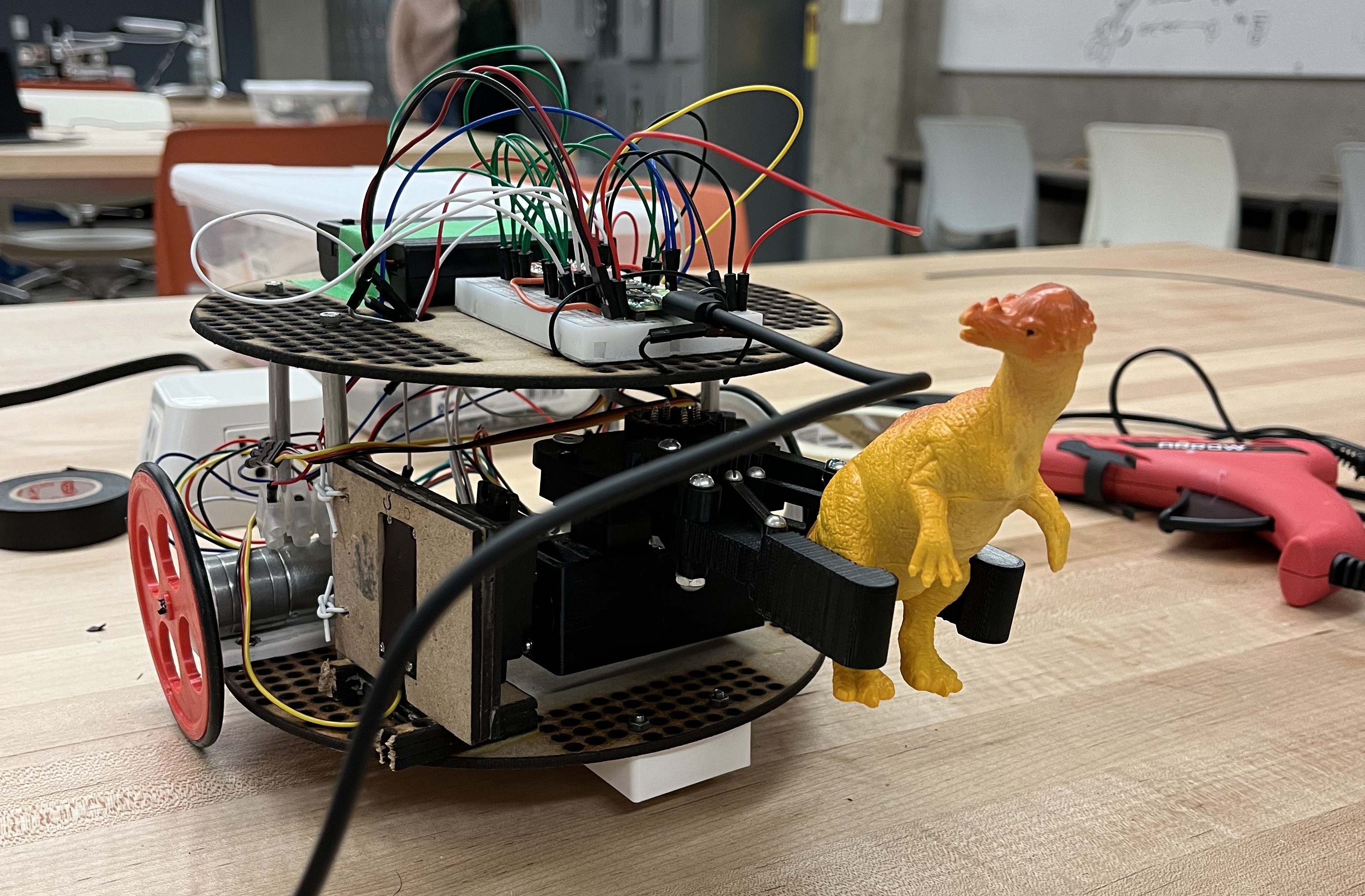
An semi-autonomous search and rescue rover used to complete an obstacle course and maneuver a payload.
Semi-Autonomous Mobile Robot & Remote Manipulator Platform
Robotics Systems Engineering Project
System Architecture & Overview
This project involved the co-development of a mobile robotic platform designed for hybrid autonomous navigation and remote manual manipulation. The system was engineered to traverse complex environments independently and switch to a teleoperated control scheme for high-precision object manipulation.
Key Technical Contributions
Mechanical Design & Manipulation
- Manipulator Engineering: Designed the mechanical linkages and end-effector mechanisms for the robot manipulator, selecting appropriate materials and actuators to meet specific payload lifting and kinematic reach requirements.
Electrical Systems & Power Distribution
- Electrical Integration: Developed the complete electrical distribution system, implementing custom power regulation, signal isolation, and circuit protection to ensure reliable operation of all onboard logic and actuators.
Wireless Communication Protocols
- Teleoperation Links: Established robust wireless communication channels between the remote base station and the mobile robot to support bidirectional control inputs and low-latency feedback streaming.
Control Systems & Navigation Algorithms
- Motion Control: Authored control loops for precise motor actuation and implemented navigation algorithms to enable autonomous trajectory tracking and situational obstacle avoidance during the untethered mapping phase.