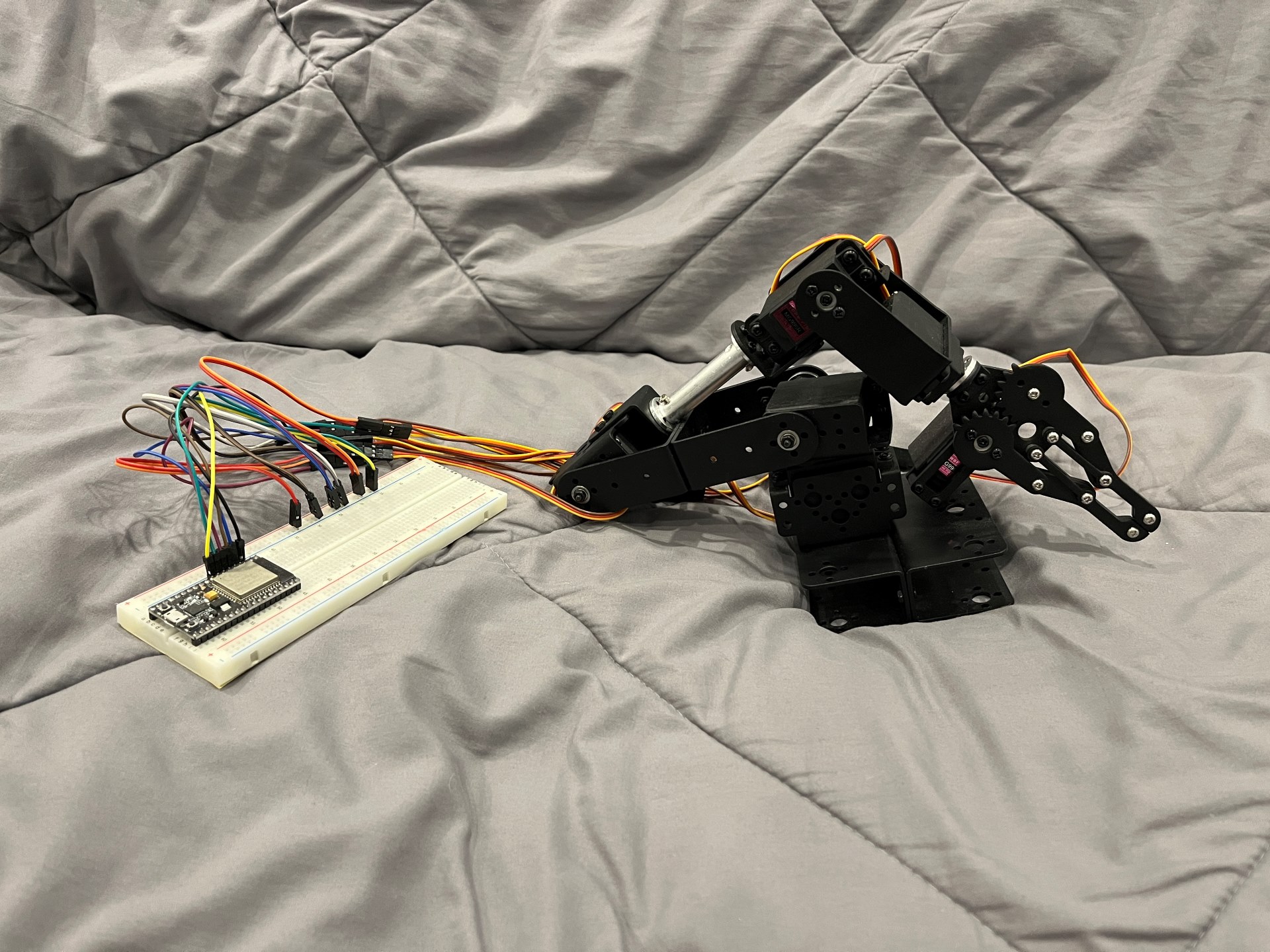
6-DOF Robotic Manipulator
CC++PythonROS2
A low level firmware to control a 6-DOF manipulator using an ESP32 microcontroller.
I am currently developing a library for my six-degree-of-freedom robotic manipulator, which controls the robot, calculates its forward and inverse, kinematics, and runs using ROS for high level controls and path planning.